
After all night of working in the lab which included spending an hour debugging a disconnected microsd card, a broken kinect cable which led to an emergency run to Gamestop on 11th and Market, putting batteries in backwards, wires coming unplugged, putting -12V into our Kinect, shorting a 12V supply, and two broken mbeds, we are all done and it works surprisingly well.
We tested our setup with three different buzzer intensity conversions. Two of our algorithms were linear, with one mapping our max depth from 0 to 63 and the other from 15 (~25% duty cycle, approximately the smallest pwm needed to feel a buzz) and our final one (the one we ended up using) was exponentially decaying.
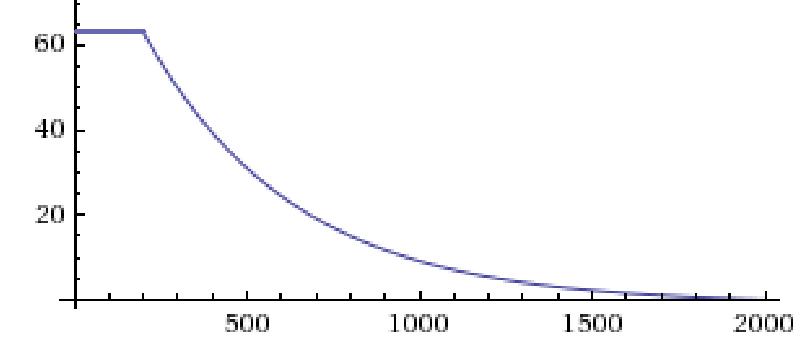
We did this to give more emphasis to closer objects.
Our final demo consisted of our professor (Prof. Mangharam) navigating a room crowded with people with his eyes closed without touching anyone or anything.
tl;dr: Everything went better than expected.