BeagleBoard
For Kinecthesia 2.0, we will be using the BeagleBoard. “But you already are using the BeagleBoard!“, you say. Yes, but before, we were using the BeagleBoard XM, and now we will be downupgrading to the plain BeagleBoard. The BeagleBoard has multiple advantages for our project, but most importantly is its size. The BeagleBoard is 3″ x 3″ while the XM is 3.25″ x 3.25″. While this might not seem like a lot, it is actually a 15% reduction in area which, for a portable device, is not too shabby. This reduction comes with a reduction in processor speed, however. The BeagleBoard runs at 600 MHz compared to the XM’s 1 GHz. This should still be enough for the purposes of our device, while consuming less power!
Smaller Kinect
We also want to trim down the size of the Kinect because as you can see in the picture below, the Kinect is gigantic — too big for our device. Fortunately, there are plenty of how-to guides on how to tear down a Kinect. We borrowed a naked Kinect from Professor Mangharam’s lab and sure enough, it works great.
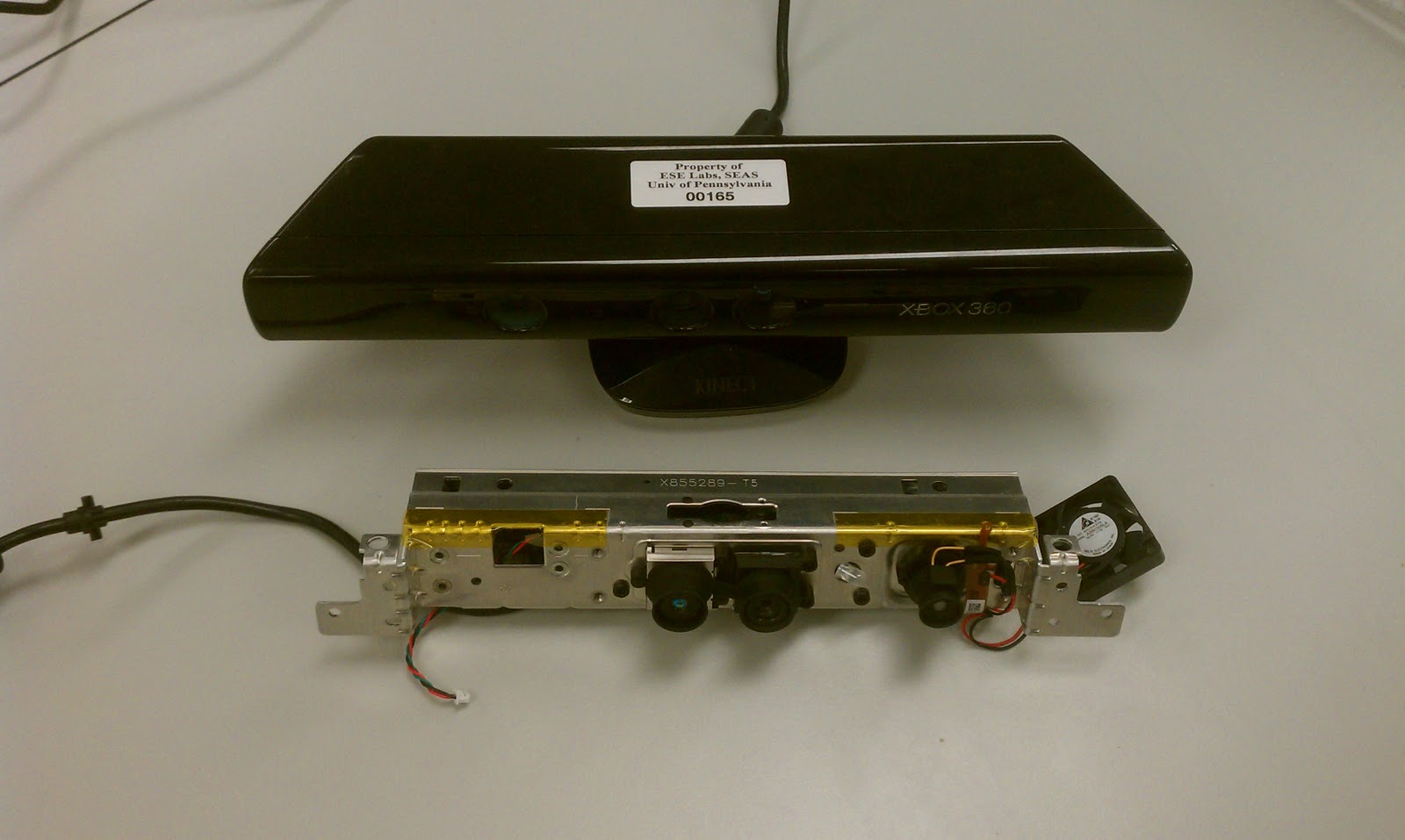
Building our own casing for the Kinect’s sensors will allow us have greater control of the design of the device while dramatically reducing weight and size. One option we have considered is to mount the processor and battery pack on the metal frame of the naked Kinect so that there are not bulky components all around the belt. The entire system (besides the vibrations motors which will still be around the waist) will all be enclosed in one case.
Update:
Stripped down Kinect specs:
length (without wings): 7 3/16 in
length (with wings): 9 1/2 in
height: 1 1/4 in
depth (without cameras): 1 3/16 in
depth (with cameras): 1 7/8
depth (with cameras and heatsink): 2 1/16 in
weight: 148 g
Kinect specs:
length (front): 11 1/8 in
length (back): 8 7/16 in
height (without base): 1 1/2 in
height (with base): 2 7/8 in
depth: 2 5/16 in
weight: 433 g
Kinecthesia version 1.0 weight: 1349 g (981 g without 16 AA batteries)
Better Vibration Motors
Our current system uses six vibration motors, however, we only have three vibration zones. Each zone has two vibrations motors working in parallel in order to increase the vibration sensation. We would like to replace these six buzzers with three stronger buzzers in order to reduce the complexity of the hardware. We would also like to change how the buzzers are mounted. Currently, the buzzers are mounted firmly to the rigid belt. This counteracts the forces of vibration and reduces the overall sensation. For increased sensation, the buzzers have to be able to move. We are experimenting with different ways to mount the buzzers, but one idea we are considering is mounting the buzzer on a wire or string (which is mounted to the belt) so it can rotate left and right around the axis of wire.
There are more updates to come, so stay tuned! Topics to look forward to: PWM on BeagleBoard, better obstacle detection, and reducing system delay.